優(yōu)必選公布人形機(jī)器人及其搬運(yùn)控制專利觀點(diǎn)
天眼查App顯示,近日,深圳市優(yōu)必選科技股份有限公司申請(qǐng)的“人形機(jī)器人及其搬運(yùn)控制方法、裝置和可讀存儲(chǔ)介質(zhì)”專利公布。
天眼查App顯示,近日,深圳市優(yōu)必選科技股份有限公司申請(qǐng)的“人形機(jī)器人及其搬運(yùn)控制方法、裝置和可讀存儲(chǔ)介質(zhì)”專利公布。
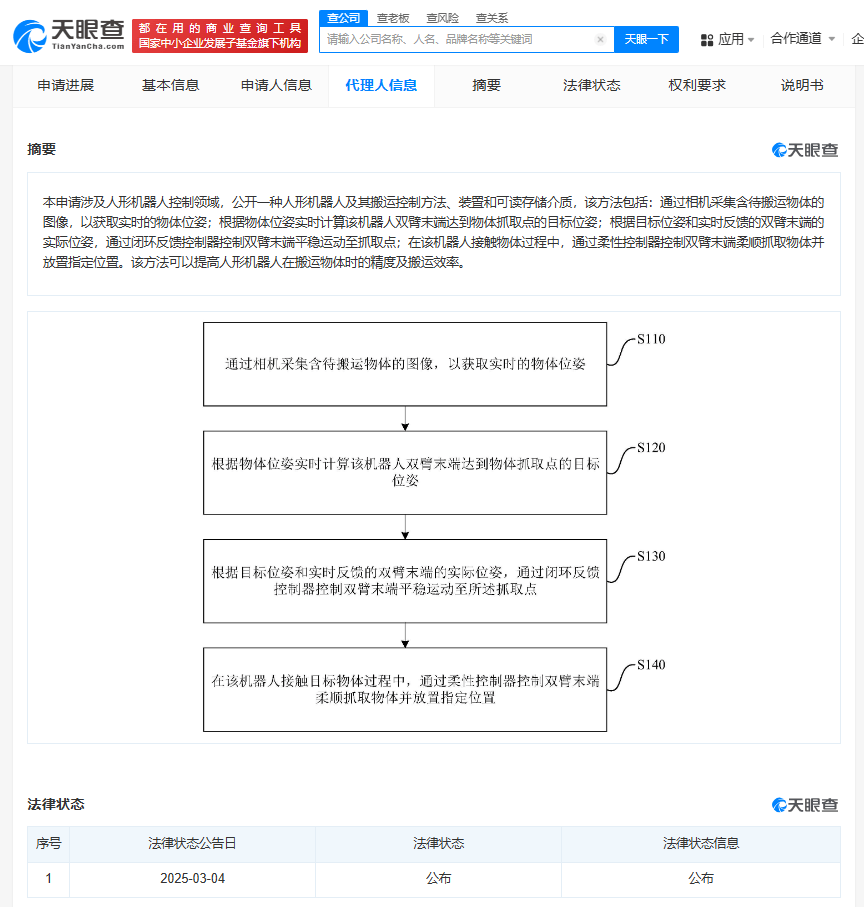
摘要顯示,本申請(qǐng)涉及人形機(jī)器人控制領(lǐng)域,公開一種人形機(jī)器人及其搬運(yùn)控制方法、裝置和可讀存儲(chǔ)介質(zhì),該方法包括:通過相機(jī)采集含待搬運(yùn)物體的圖像,以獲取實(shí)時(shí)的物體位姿;根據(jù)物體位姿實(shí)時(shí)計(jì)算該機(jī)器人雙臂末端達(dá)到物體抓取點(diǎn)的目標(biāo)位姿;根據(jù)目標(biāo)位姿和實(shí)時(shí)反饋的雙臂末端的實(shí)際位姿,通過閉環(huán)反饋控制器控制雙臂末端平穩(wěn)運(yùn)動(dòng)至抓取點(diǎn);在該機(jī)器人接觸物體過程中,通過柔性控制器控制雙臂末端柔順抓取物體并放置指定位置。該方法可以提高人形機(jī)器人在搬運(yùn)物體時(shí)的精度及搬運(yùn)效率。
1.TMT觀察網(wǎng)遵循行業(yè)規(guī)范,任何轉(zhuǎn)載的稿件都會(huì)明確標(biāo)注作者和來源;
2.TMT觀察網(wǎng)的原創(chuàng)文章,請(qǐng)轉(zhuǎn)載時(shí)務(wù)必注明文章作者和"來源:TMT觀察網(wǎng)",不尊重原創(chuàng)的行為TMT觀察網(wǎng)或?qū)⒆肪控?zé)任;
3.作者投稿可能會(huì)經(jīng)TMT觀察網(wǎng)編輯修改或補(bǔ)充。
